2018金砖+大赛之首届“工业机器人装调维修技术”赛项技术规程(精简版)
企学研
2019-03-03 16:51
阅读
收藏
一、竞赛项目
赛项编号:JZ005
赛项名称:工业机器人装调维修技术
赛项组别:中职组、高校组、教师组
赛项归属产业:智能制造、机器人产业、新兴技术产业
赛项类型:国际级竞赛
二、竞赛目的
工业机器人作为智能制造核心装备之一,已经广泛的应用到各行各业。赛项针对工业机器人装调维修岗位,面向高等院校机器人工程、工业机器人技术、机器人应用与维护、机电一体化和自动化技术等专业,注重将产业技术发展趋势、规律与院校的专业建设和人才培养规律有机结合,体现行业特色和产教协同发展、协同育人的理念,围绕真实工作过程、任务和要求设计竞赛内容,重点考查选手的实际动手能力、规范操作和创新创意水平,检验参赛选手的综合职业能力。通过技能竞赛促进院校机器人相关专业的发展、课程建设以及人才培养质量,解决机器人产业迅猛增长与专业人才严重短缺的矛盾,提升机器人技能型人才水平和数量,服务智能制造领域,为探索申请世界技能大赛开设金砖板块积累成果和经验。
三、竞赛内容
(一)竞赛方式
竞赛为团体赛,每队由2名选手组成。整个竞赛过程包括:第一阶段“实操竞赛”和第二阶段“答辩展示”两个方面内容。学生组实操竞赛与答辩展示在总成绩中权重分别为90%和10%,教师组实操竞赛与答辩展示在总成绩中权重分别占70%和30%。
每所院校每个组别限报1支参赛队,参赛选手为同一学校,不允许跨校组队;决赛时中职组、高校组、教师组参赛队伍,每组均不超过为30支队伍。
天津博诺机器人技术有限公司将针对竞赛内容分批组织培训,每次培训结束,由赛项组委会根据专家组命题题库,抽取试题和邀请第三方裁判,对培训学员进行考试选拨,根据每批次考试结果,由赛项组委会通知公示晋级决赛的队伍名单。
(二)实操竞赛内容
实操竞赛需要参赛选手在270分钟内,以工业机器人装调与维修实训平台作为竞赛平台,完成机器人机械结构装调、电气控制系统装调、零点标定、工业机器人控制程序编制及工件装配等四个综合任务。
1.实操竞赛具体内容:
(1)按任务要求完成工业机器人机械结构装调。
(2)按任务要求完成工业机器人电气控制系统装调。
(3)按任务要求完成工业机器人零点标定。
(4)对机器人系统进行编程和综合调试,完成任务书规定的装配任务。
(三)答辩展示内容
学生组(含中职组与高校组)答辩展示环节,要求参赛选手(选1名代表)围绕“如何提高工业机器人装配精度”这一主题,在10分钟时间内进行技术文件展示及答辩汇报。答辩展示主要考察选手在执行工作任务过程中的直观展示性、功能性、价值导向性、经济性、生产和工作过程导向性、社会接受度、环保性、创造性等八个方面的职业能力。
教师组(选1名代表)答辩展示采用说课形式,时间为15分钟,内容与工业机器人相关即可,说课内容包含但不限于:课程教学目标和定位,学习情境学习目标、教学内容、教学方法、教学过程、教学媒体、资源和环境选择以及教学评价。该环节旨在考察教师对教学设计、课件制作、师范素养等方面的掌握程度。
所有参赛选手的技术文件(PPT、视频等)由各参赛队在赛前提前制作完成。
四、竞赛方式
本赛项为团体赛,不计选手个人成绩,统计参赛队总成绩进行排序。每支参赛队由2名选手组成,指定1人为队长,学生组竞赛可以设置不超过2名指导教师,每队设置领队1名。
竞赛采取多场次进行,由赛项组委会按照竞赛流程组织各领队参加公开抽签,确定各队参赛场次。参赛队按照抽签确定的参赛时段分批次进入竞赛场地参赛。
五、技术规范
1.竞赛标准
根据教育部中等职业学校和高等院校加工制造专业类教学指导方案,参照工业机器人装调维修工、工业机器人操作调整工、工业机器人安全规范等国家职业技术标准要求实施,如表2所示。
表2 技术标准
| 序号 |
标准号 |
名称 |
| 1 |
JX04-24-01 |
工业机器人装调维修工 |
| 2 |
JX04-24-02 |
工业机器人操作调整工 |
| 3 |
GBT 26154-2010 |
装配机器人通用技术条件标准 |
| 4 |
GB 11291-1997 |
工业机器人安全规范 |
| 5 |
SJ/T 10533-94 |
电子设备制造防静电技术要求 |
| 6 |
JY 0001-2003 |
教学仪器设备产品一般质量要求 |
| 7 |
LD/T81.1-2006 |
职业技能实训和鉴定设备通用技术规范 |
| 8 |
6-05-02-03 |
数控机床装调维修工国家职业标准 |
2.职业道德
(1)爱岗敬业,忠于职守,严于律已;
(2)刻苦学习,钻研业务,善于观察,勤于思考;
(3)认真负责,吃苦耐劳;
(4)遵守操作规程,安全、文明生产;
(5)着装规范整洁,爱护设备,保持工作环境清洁有序。
3.相关知识与技能
(1)六关节工业机器人工作原理;
(2)六关节工业机器人机械结构、安装、检测、调试;
(3)六关节工业机器人控制系统原理、装配、调试和故障排除;
(4)六关节工业机器人应用程序编写与整机调试。
六、技术平台
本次大赛的竞赛技术平台采用BNRT-BRICS-RBT3型工业机器人装调维修实训系统(如图3所示),竞赛器材由组委会统一提供。
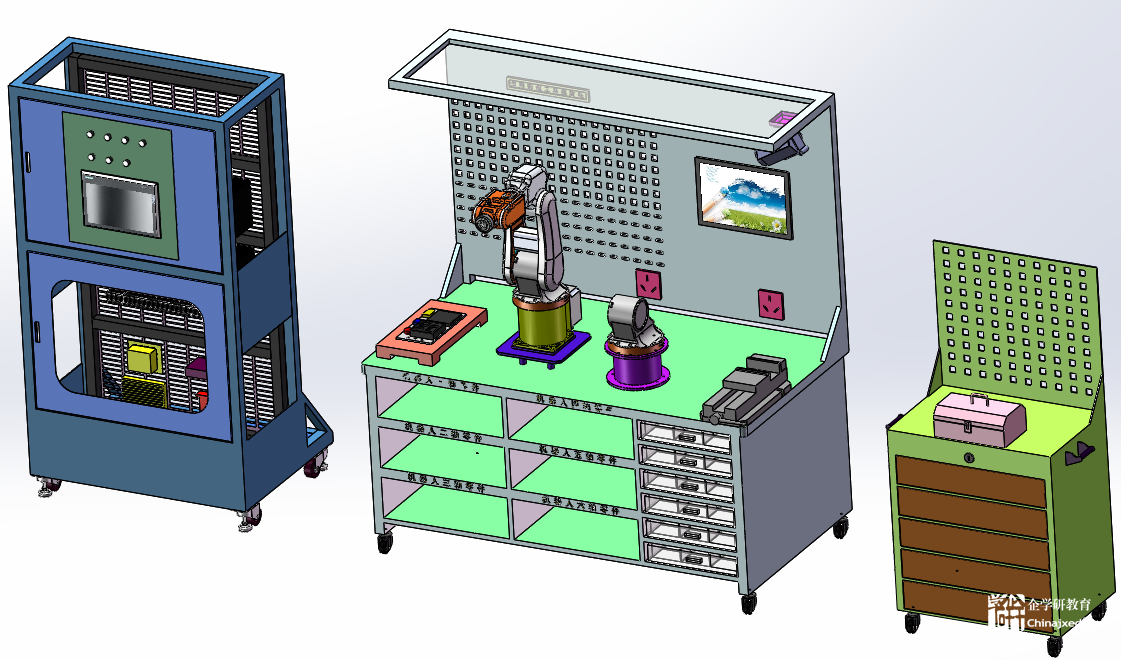
图3 工业机器人装调维修技术竞赛平台
工业机器人装调维修实训系统设置了机械装置装配、电气装置装配、整机装配、整机调试、校准、标定、维护与保养、维修、培训与管理等9个职业功能,可完成工业机器人装调与维修实训任务,能够满足《工业机器人装调维修工》的理论考核和实训考核任务,符合技能鉴定考核标准;该平台采用关节式结构,按工业标准要求设计,结构简单、紧凑,适用于机器人装调与维修实训,可锻炼学生动手能力和精密装配能力,并且各单元模块可以拆装到螺钉级。使学生更深入了解工业现场常用的机器人本体内部机械结构、机械连接、电机安装、减速器装配、同步带传动等。
该设备由装配工作台、六自由度工业机器人、机器人控制系统及工具车组成,具体结构如图4至5所示。
机器人本体的拆装需要严格按照步骤来执行,不可跳过或者穿插执行;本体各轴结构示意图拆的顺序为J6轴到J1轴,装的顺序为J1轴到J6轴,由于机器人本体内部布有电气线路,所以在拆装时要注意电气线路的布局。
图4拆装工作台 图5 6自由度工业机器人本体
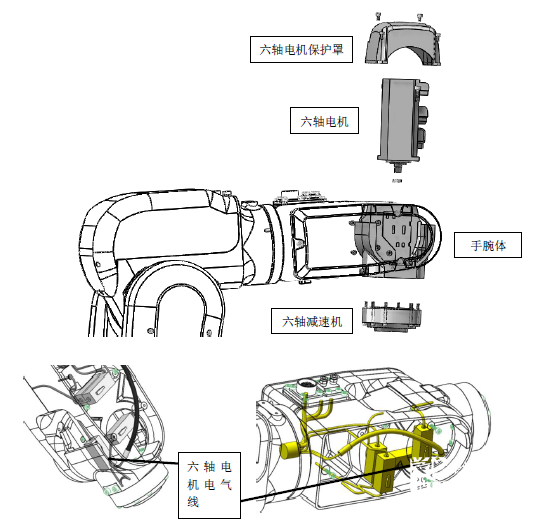
图6 6轴拆卸示意图
以第6轴为例,拆卸的示意图如图6所示。拆卸J6轴电机或减速机时,应首先将机器人运动到上图所示姿态,将J6轴电机保护罩上的安装螺栓去掉,并取下J6轴电机保护罩,并将J6轴电机的快插拔掉。最后将J6轴减速机安装螺栓拆除,取出六轴减速机。减速机取出时注意不要碰撞到减速机本体。然后将减速机与柔轮取出,便可取出J6轴电机。重新安装时,应首先将电机安装到手腕体上并紧固,后将波发生器与柔轮固定在电机轴上,再将减速机安装在手腕体上。安装减速机时,应边旋转电机边安装到手腕体上。
机器人控制系统主要包括伺服驱动、伺服电机、控制器、IO接口板、操作盒、示教器。这些主要部件均安装在网孔架上。外围框架由40*40方管、30*30方管焊接而成。中间装配有标准网孔板,网孔板中间冲孔,便于电气元件安装。框架底部装有带地脚滚轮,便于移动位置。
工具车配置清单如表3所示。
表3 工具车工具配置表
| 名称 |
参数 |
| 拆装工具 |
1.扭矩扳手:扭力扳手、铬钒合金钢
2.游标卡尺:数显功能、精度±0.02mm,规格0-150mm
3.万用表:数显式,具有自动恢复保险丝保护,防误测,具有金属抗干扰遮罩、自动关机、短路蜂鸣、短路灯知识、电池低压指示等功能
4.卡簧钳(内、外)
5.工具箱:放置工具
6.活动扳手:铸钢
7.斜口钳
8.内六方扳手;
9.电动扳手
10.压线钳
11.剥线钳
12.电钻套件 |
七、成绩评定
1.评分标准
竞赛项目满分为100分,配分如表4所示。
表4 配分表
| 项目 |
任务一 |
任务二 |
任务三 |
任务四 |
职业素养 |
答辩展示 |
| 学生组分数 |
30 |
20 |
20 |
10 |
10 |
10 |
| 教师组分数 |
20 |
15 |
15 |
10 |
10 |
30 |
任务一:六自由度工业机器人机械结构装调
| 序号 |
装调任务要求 |
分值 |
| 学生 |
教师 |
| 1 |
J1轴装配,并在线测试 |
4 |
2.5 |
| 2 |
J2轴装配,并在线测试 |
4 |
2.5 |
| 3 |
J3轴装配,并在线测试 |
4 |
2.5 |
| 4 |
J4轴装配,并在线测试 |
4 |
2.5 |
| 5 |
J5轴装配,并在线测试 |
4 |
2.5 |
| 6 |
J6轴装配,并在线测试 |
4 |
2.5 |
| 7 |
机器人整体调试 |
6 |
5 |
| 合计 |
30 |
20 |
任务二:六自由度工业机器人电气控制系统装调
| 序号 |
工作台上机器人性能要求 |
分值 |
| 学生 |
教师 |
| 1 |
电控柜安装布局规划与线槽安装 |
2 |
1 |
| 2 |
伺服驱动安装与接线 |
1 |
1 |
| 3 |
控制器安装与接线 |
1 |
1 |
| 4 |
安全板安装与接线 |
3 |
2 |
| 5 |
控制器扩展接口板安装与接下 |
3 |
2 |
| 6 |
其他电气元件的安装与接线 |
3 |
2 |
| 7 |
操作盒的安装与接线 |
3 |
2 |
| 8 |
电磁阀电气接线与安装 |
2 |
2 |
| 9 |
吸盘吸取/放置 |
2 |
2 |
| 合计 |
20 |
15 |
任务三:六自由度工业机器人零点标定
| 序号 |
评分项目 |
分值 |
| 学生 |
教师 |
| 1 |
正确设置并调整工业机器人各关节伺服运动参数 |
6 |
5 |
| 2 |
手动操作工业机器人各关节正反向运动 |
9 |
6 |
| 3 |
通过示教器完成编码器清零及机器人零位标定 |
5 |
4 |
| 合计 |
20 |
15 |
任务四:场地任务
| 序号 |
评分项目 |
分值 |
| 1 |
工业机器人程序编写完成规定任务 |
10 |
| 合计 |
10 |
任务五:职业素养
| 序号 |
评分项目 |
分值 |
| 1 |
公平竞赛,遵守赛场纪律 |
2 |
| 2 |
操作规范,无事故 |
2 |
| 3 |
着装规范整洁,爱护设备,保持竞赛环境清洁有序 |
2 |
| 4 |
团队分工合理,冷静、高效,一丝不苟 |
2 |
| 5 |
工具的使用符合工业安全 |
2 |
| |
合计 |
10 |
任务六:答辩展示
| 序号 |
评分项目 |
分值 |
| 学生 |
教师 |
| 1 |
功能和结构 |
1 |
3 |
| 2 |
使用价值 |
1 |
3 |
| 3 |
节约成本 |
1 |
3 |
| 4 |
人性化设计 |
1 |
3 |
| 5 |
团队合作 |
1 |
3 |
| 6 |
事故预防 |
1 |
3 |
| 7 |
环保性 |
1 |
3 |
| 8 |
创造性 |
1 |
3 |
| 9 |
答辩展示效果 |
2 |
6 |
| 合计 |
10 |
30 |
完整版技术规程下载请点击:http://www.chinajxedu.com/uploadfile/2019/0303/20190303045443606.pdf


