2018金砖+大赛之首届“移动机器人”赛项技术规程(精简版)
一、竞赛项目
赛项编号:JZ004
赛项名称:移动机器人
赛项组别:中职组、高校组、教师组
赛项归属产业:智能制造、机器人产业、新兴技术产业
赛项类型:国际级竞赛
二、竞赛目的
以“中国制造2025”为背景,针对装备制造业转型升级对岗位技能提升的要求,面向全国中等职业学校和高等院校机器人工程、工业机器人技术、机器人应用与维护、机电一体化和自动化技术等专业,围绕真实工作过程、任务和要求设计竞赛内容,重点考察选手的实际动手能力、规范操作和创新创意水平,检验参赛选手的综合职业能力。通过技能竞赛促进中等职业学校和高等院校机器人相关专业发展、课程建设和人才培养质量,为世界技能大赛移动机器人赛项助力,解决机器人产业迅猛增长与专业人才严重短缺的矛盾,提升机器人技能型人才水平和数量,服务智能制造领域,为探索申请世界技能大赛开设金砖板块积累成果和经验。
三、竞赛内容
(一)竞赛方式
竞赛为团体赛,每队由2名选手组成。整个竞赛过程包括:第一阶段“实操竞赛”和第二阶段“答辩展示”两个方面内容。学生组实操竞赛与答辩展示在总成绩中权重分别为90%和10%,教师组实操竞赛与答辩展示在总成绩中权重分别占70%和30%。
每所院校每个组别限报1支参赛队,参赛选手为同一学校,不允许跨校组队;决赛时中职组、高校组、教师组参赛队伍,每组均不超过40支队伍。
天津博诺机器人技术有限公司将针对竞赛内容分批组织培训,每次培训结束,由赛项组委会根据专家组命题题库,抽取试题和邀请第三方裁判,对培训学员进行考试选拨,根据每批次考试结果,由赛项组委会通知公示晋级决赛的队伍名单。
(二)实操竞赛内容
参赛选手在270分钟内,根据赛场提供的任务书和有关资料,完成竞赛任务。
1.移动机器人整体装调任务。
2.移动机器人运动控制调试任务。
3.场地遥控运行任务。
4.移动机器人系统自动运行任务。
(三)答辩展示内容
学生组(含中职组与高校组)答辩展示环节,要求参赛选手(选1名代表)围绕“移动机器人技术应用”这一主题,在10分钟时间内进行技术文件展示及答辩汇报,主要考察选手在执行工作任务过程中的功能和结构、使用价值、节约成本、人性化设计、团队合作、事故预防、环保性、创新性等八个方面的职业能力。
教师组(选1名代表)答辩展示采用说课形式,时间为15分钟,内容与移动机器人相关即可,说课内容包含但不限于:课程教学目标和定位,学习情境,学习目标、教学内容、教学方法、教学过程、教学媒体、资源和环境选择以及教学评价。该项目旨在考察教师对教学设计、课件制作、师范素养等师范技能的掌握程度。
所有参赛选手的技术文件(PPT、视频等)由各参赛队在赛前提前制作完成。
四、竞赛方式
本赛项为团体赛,不计选手个人成绩,统计参赛队总成绩进行排序。每支参赛队由2名选手组成,指定1人为队长,学生组竞赛可以设置不超过2名指导教师,每队设置领队1名。
竞赛采取多场次进行,由赛项组委会按照竞赛流程组织各领队参加公开抽签,确定各队参赛场次。参赛队按照抽签确定的参赛时段分批次进入竞赛场地参赛。
五、技术规范
1.竞赛标准
根据教育部中等职业学校和高等院校加工制造专业类教学指导方案,参照工业机器人装调维修工、工业机器人操作调整工、工业机器人安全规范等国家职业技术标准要求实施,如表3所示。
表3 技术标准
| 序号 |
标准号 |
名称 |
| 1 |
JX04-24-01 |
工业机器人装调维修工 |
| 2 |
JX04-24-02 |
工业机器人操作调整工 |
| 3 |
GBT 26154-2010 |
装配机器人通用技术条件标准 |
| 4 |
GB 11291-1997 |
工业机器人安全规范 |
| 5 |
SJ/T 10533-94 |
电子设备制造防静电技术要求 |
| 6 |
JY 0001-2003 |
教学仪器设备产品一般质量要求 |
| 7 |
LD/T81.1-2006 |
职业技能实训和鉴定设备通用技术规范 |
| 8 |
6-05-02-03 |
数控机床装调维修工国家职业标准 |
| 9 |
6-08-04-02 |
电子设备装接工国家职业标准 |
2.职业道德
(1)敬业爱岗,忠于职守,严于律已;
(2)刻苦学习,钻研业务,善于观察,勤于思考;
(3)认真负责,吃苦耐劳;
(4)遵守操作规程,安全、文明生产;
(5)着装规范整洁,爱护设备,保持工作环境清洁有序。
3.相关知识与技能
(1)小型机器人的工作原理;
(2)小型机器人机械结构、安装、检测、调试;
(3)小型机器人控制系统原理、装配、调试和故障排除;
(4)小型机器人应用程序编写;
(5)小型机器人整机调试。
六、技术平台
本次大赛的竞赛平台采用基于第44届世界技能大赛研制的BNRT-MOB-44型移动机器人,竞赛器材由组委会统一提供。每套设备由上百种零件组成。采用模块化设计,具备通用型接口,可以根据需求组成不同结构形式,能激发学生创新思维,同时能够满足技能竞赛要求。
移动机器人设备如图1所示。

图1 BNRT-MOB-44型移动机器人套件
1.配置工业级的铝合金结构组件;
2.配置NImyRIO控制器、NI LabVIEW学生版软件及工具包;
3.配置传感器套件:智能相机、无线遥控手柄、USB-HUB、超声波测距传感器、陀螺仪、IR红外传感器、QTI传感器、12V6800mAh的锂电池和充电器、ON/OFF电源开关、电线和控制电路板;
4.配置带编码器的12V直流减速电机;
5.配置5V数字舵机。
6.配置4x60mm麦克纳姆轮组件;
7.配置2x190mm的直线导轨和滑块;
8.主控制器如图2所示,直流供电范围为6V~16V,易于上手使用、编程开发简单,板载资源丰富:共有40条数字I/O线,支持SPI、PWM输出、正交编码器输入、UART和I2C,以及8个单端模拟输入,2个差分模拟输入,4个单端模拟输出和2个对地参考模拟输出,方便通过编程控制连接各种传感器及外围设备;

图2 主控制器实物图
9.电机和传感器控制板如图3所示,包含直流减速电机控制模块、电源模块、光耦隔离模块、6路电机驱动模块、5路舵机驱动模块、5路超声波测距模块、陀螺仪模块、双P34插针接口等方便控制和连接主控制器;
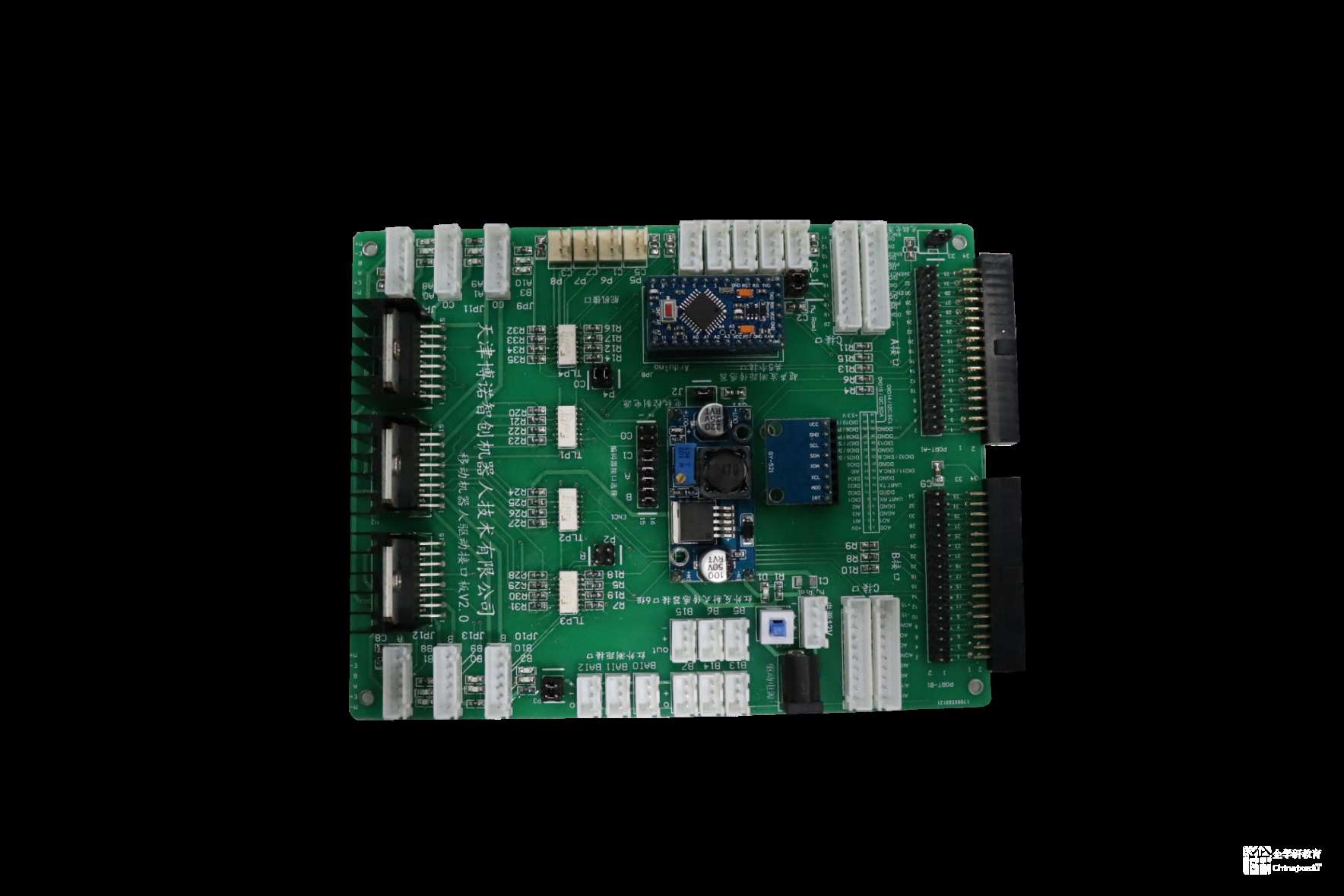
图3 控制板实物图
10.支架和结构组件
弹簧联轴器(外径19长25孔径6-8),无油轴套(外径10内径8),滚珠丝杠(带螺母)1204长270,浅茶色半透明有机玻璃板180×240×3,螺丝(M3×10mm),螺丝(M3×6mm),螺丝(M3×8mm),尼龙防松螺母M3,内六角扳手3mm,内六角扳手2.5mm,内六角扳手2mm,扳手5.5mm,3D打印固定件一组,电机固定支架4个,U型铝型材车身底盘配件,机械手爪配件一套,手爪提升机构一套;
11.配套移动机器人教材和教学视频,可满足1.LabVIEW图形化编程软件的使用,2.myRIO功能IO基本使用,3.机械结构的搭建,4.直流电机闭环PID调速,5.myRIO控制器开发,6.ARM与FPGA的使用练习,7.移动机器人场地分拣,8.移动机器人视觉识别等实训要求。
七、成绩评定
采用过程评价与结果评价相结合、能力评价与职业素养评价相结合的方式。竞赛项目满分为100分,具体评分细则如表4所示。
表4 竞赛项目配分表
| 项目 |
任务一 |
任务二 |
任务三 |
任务四 |
职业素养 |
答辩
展示 |
| 学生组 |
20 |
20 |
20 |
20 |
10 |
10 |
| 教师组 |
15 |
15 |
15 |
15 |
10 |
30 |
| 任务一:移动机器人整体装调 |
| 序号 |
装调任务要求 |
分值 |
| 学生 |
教师 |
| 1 |
移动平台轮系正确安装,螺钉紧固 |
2 |
2 |
| 2 |
传感器支架安装与调整 |
2 |
1 |
| 3 |
导轨安装与调整 |
2 |
2 |
| 4 |
丝杠及其连接部分的安装 |
2 |
1 |
| 5 |
提升电机单元安装与丝杠调整 |
2 |
1 |
| 6 |
myRIO控制器支撑底板的安装 |
2 |
1 |
| 7 |
舵机安装 |
2 |
1 |
| 8 |
手爪安装 |
2 |
2 |
| 9 |
电气线路连接 |
2 |
2 |
| 10 |
网络通信地址设置 |
2 |
2 |
| 合计 |
20 |
15 |
| 任务二:移动机器人运动控制调试 |
| 序号 |
在工作台上的机器人性能要求 |
分值 |
| 学生 |
教师 |
| 驱动电机性能要求 |
| 1 |
驱动电机方向控制:正向/反向旋转 |
2 |
1 |
| 2 |
驱动电机速度控制:慢速/快速旋转 |
2 |
1 |
| 3 |
机器人直线运动控制:前进/后退 |
2 |
1 |
| 4 |
机器人转向运动控制:左转/右转 |
2 |
1 |
| 5 |
机器人平移运动控制:左平移/右平移 |
2 |
1 |
| 信息采集系统性能 |
| 6 |
超声测距传感器和红外传感器 |
2 |
2 |
| 7 |
手柄的调试界面与通信 |
2 |
2 |
| 8 |
视觉系统(图像采集) |
2 |
2 |
| 针对目标物体的性能 |
| 9 |
手爪张开/夹紧 |
2 |
2 |
| 10 |
手臂上升/下降 |
2 |
2 |
| 合计 |
20 |
15 |
| 任务三:移动机器人系统联调 |
| 序号 |
评分项目 |
分值 |
| 学生 |
教师 |
| 1 |
使移动机器人自动完成沿U型走廊行走,且不碰到走廊与前、后端墙壁 |
5 |
3 |
| 2 |
智能视觉系统完成对目标球的颜色识别与二维码识别 |
5 |
4 |
| 3 |
移动机器人自动完成寻找固定位置放置台球并抓取 |
5 |
4 |
| 4 |
移动机器人自动完成将台球放置指定位置,并返回场地 |
5 |
4 |
| 合计 |
20 |
15 |
| 任务四:场地任务 |
| 序号 |
评分项目 |
分值 |
| 学生 |
教师 |
| 1 |
遥控移动机器人完成任务 |
10 |
7 |
| 2 |
移动自动完成工作任务 |
10 |
8 |
| 合计 |
20 |
15 |
| 任务五:职业素养 |
| 序号 |
评分项目 |
分值 |
| 1 |
公平竞赛,遵守赛场纪律 |
2 |
| 2 |
操作规范,无事故 |
2 |
| 3 |
着装规范整洁,爱护设备,保持竞赛环境清洁有序 |
2 |
| 4 |
团队分工合理,冷静、高效,一丝不苟 |
2 |
| 5 |
工具的使用符合工业安全 |
2 |
| 合计 |
10 |
| 任务六:答辩展示 |
| 序号 |
评分项目 |
分值 |
| 学生 |
教师 |
| 1 |
功能和结构 |
1 |
3 |
| 2 |
使用价值 |
1 |
3 |
| 3 |
节约成本 |
1 |
3 |
| 4 |
人性化设计 |
1 |
3 |
| 5 |
团队合作 |
1 |
3 |
| 6 |
事故预防 |
1 |
3 |
| 7 |
环保性 |
1 |
3 |
| 8 |
创造性 |
1 |
3 |
| 9 |
答辩展示效果 |
2 |
6 |
| 合计 |
10 |
30 |
| |
|
|
|
|
|
|
|
|
|
|
|
完整版技术规程下载请点击:http://www.chinajxedu.com/uploadfile/2019/0303/20190303091149276.pdf

